Target cloud: point cloud from Kinect
Normal cloud: a cloud of normal for shape model cloud
Step 1: Normal estimation based on point cloud itself
Step 2: Figure out the normal direction based on the view port position
Step 3: Find the correspondence in target cloud for each point in source cloud (shape model)
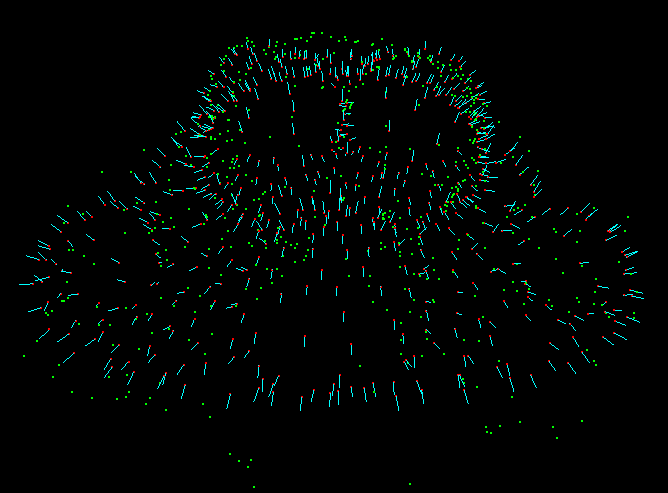
Results:
 |
| Figure 1 Red points: shape model cloud; Blue line: normal starts from point; colorful point: cloud from Kinect |
 |
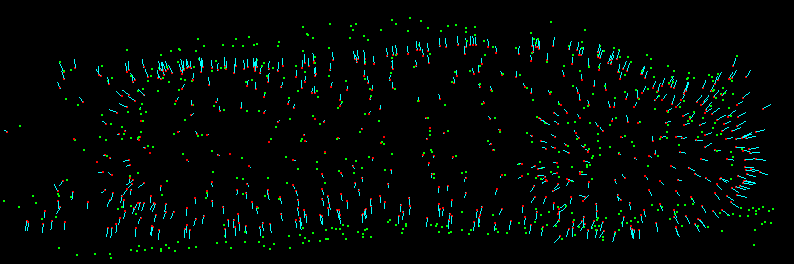
| Figure 2 Side view of Figure 1. |
 |
| Figure 3 Top view of Figure 1. |
 |
| Figure 4 Green points are the correspondences obtained from normal shooting |

No comments:
Post a Comment